
My research is on learning to use and interpret different imaging sensors for the purpose of robotics. The goal for this work is to be able to plug and play different sensors, aiding in the deployment of novel cameras. Interests include compter vision, machine learning, embedded systems. Also how we can use cameras in intersting and novel ways to enable complex and difficult tasks.
PhD Student at the Australian Centre for Field Robotics at the University of Sydney.
Completed a Bachelors of Mechatronic Engineering (Honours) at the University of Sydney.
The Latest Projects
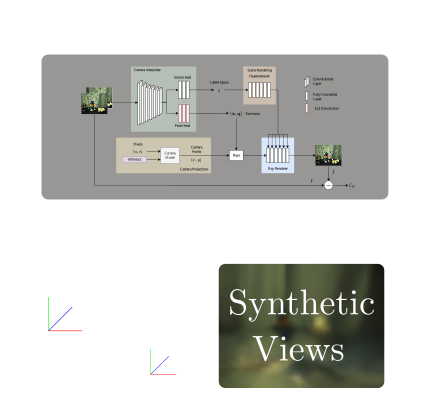
NOCaL: Calibration Free Odometry →
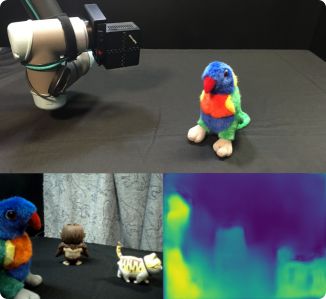
Unsupervised Learning of Depth and Odometry with Light Field Cameras →
Mobile Lightstage for Facial Detection
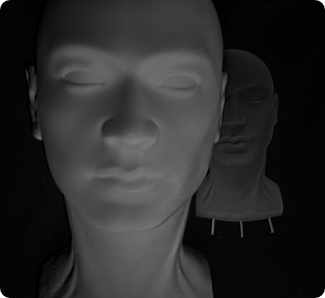
Facial Recognition using varying lighting from a display.